
Introduction to the Xen Virtual Machine
This article is intended mainly for developers who are new to Xen and who want to know more about it. The first two sections, however, are general and do not deal with code.
The Xen VMM (virtual machine monitor) is an open-source project that is being developed in the computer laboratory of the University of Cambridge, UK. It enables us to create many virtual machines, each of which runs an instance of an operating system.
These guest operating systems can be a patched Linux kernel, version 2.4 or 2.6, or a patched NetBSD/FreeBSD kernel. User applications can run on guest OSes as they are, without any change in code. Sun also is working on a Solaris-on-Xen port.
I have been following the Xen project closely for more than a year. My interest in Xen began after I read about it in the OLS (Ottawa Linux Symposium) 2004 proceedings. It increased after hearing an interesting lecture on the subject at a local UNIX group meeting.
Full virtualization has been done with some hardware emulators; one of the popular open-source projects is the Bochs IA-32 Emulator. Another known project is qemu. The disadvantage of hardware emulators is their performance.
The idea behind the Xen Project (para-virtualization) is not new. The performance metrics and the high efficiency it achieves, however, can be seen as a breakthrough. The overhead of running Xen is very small indeed, about 3%.
As was said in the beginning, currently Xen patches the kernel. But, future processors will support virtualization so that the kernel can run on it unpatched. For example, both Intel VT and AMD Pacifica processors will include such support.
In August 2005, XenSource, a commercial company that develops virtualization solutions based on Xen, announced in Intel Developer Forum (IDF) that it has used Intel VT-Enabled Platforms with Xen to virtualize both Linux and Microsoft Windows XP SP2.
Xen with Intel VT or Xen with AMD Pacifica would be competitive with if not superior to other virtualization methods, as well as to native operation.
In the same arena, VMware is a commercial company that develops the ESX server, a virtualization solution not based on Xen. VMware announced in early August 2005 that it will be providing its partners with access to VMware ESX Server source code and interfaces under a new program called VMware Community Source.
A clear advantage of VMware is that it does not require a patch on the guest OS. The VMware solution also enables the guest OS to be Windows. VMware solution is probably slower than Xen, though, because it uses shadow page tables whereas Xen uses both direct and shadow page tables.
Xen already is bundled in some distributions, including Fedora Core 4, Debian and SuSE Professional 9.3, and it will be included in RHEL5. The Fedora Project has RPMs for installing Xen, and other Linux distros have prepared installation packages for Xen as well.
In addition, there is a port of Xen to IA-64. Plus, an interesting Master's Thesis already has been written on the topic, "HPC Virtualization with Xen on Itanium".
Support for other processors is in progress. The Xen team is working on an x86_64 port, while IBM is working on Power5 support.
The Xen Web site has some versions available for download, both the 2.0.* version and the xen-unstable version, also termed xen-3.0-devel. You also can use the Mercurial source code management system to download the latest version.
I installed the xen-3.0-devel, because at the time, the 2.0.* version did not have the AGP support I had needed. This may have changed since my installation. I found the installation process to be quite simple. You should run make world and make install, update the bootloader conf file and that's it--you're ready to boot into Xen. You should follow the instructions in the user manual for best results.
The protection model of the Intel x386 CPU is built from four rings: ring 0 is for the OS and ring 3 is for user applications. Rings 1 and 2 are not used except in rare cases, such as OS/2; see the IA-32 Intel Architecture Software Developer's Manual, Volume 1: Basic Architecture, section 4.5 (privilege levels).
In Xen, a "hypervisor" runs in ring 0, while guest OSes run in ring 1 and applications run in ring 3. The x64/64 is a little different in this respect: both guest kernel and applications run in ring 3 (see Xen 3.0 and the Art of Virtualization, section 4.1 in OLS 2005 proceedings).
Xen itself is called a hypervisor because it operates at a higher privilege level than the supervisor code of the guest operating systems that it hosts.
At boot time, Xen is loaded into memory in ring 0. It starts a patched kernel in ring 1; this is called domain 0. From this domain you can create other domains, destroy them, perform migrations of domains, set parameters to a domain and more. The domains you create also run their kernels in ring 1. User applications run in ring 3. See Figure 1, illustrating the x86 protection rings in Xen.

Figure 1
Currently, domain 0 can be a patched 2.4 or 2.6 Linux kernel. According to the Xen developer mailing list, however, it seems that in the future, domain 0 will support only a 2.6 kernel patch. Much of the work of building domain0 is done in construct_dom0() method, in xen/arch/x86/domain_build.c.
The physical device drivers run only in the privileged domain, domain 0. Xen relies on Linux or another patched OS kernel to provide virtually all of its device support. The advantage of this is it liberates the Xen development team from having to write its own device drivers.
Using Xen on a processor that has a tagged TLB improves performance. A tagged TLB enables attaching address space identifier (ASID) to the TLB entries. With this feature, there is no need to flush the TLB when the processor switches between the hypervisor and the guest OSes, and this reduces the cost of memory operations.
Some manufacturers offer this tagged TLB feature. For example, a document titled "AMD64 Virtualization Codenamed 'Pacifica' Technology Secure Virtual Machine Architecture Reference Manual" was published in May 2005. According to it, this architecture uses a tagged TLB.
Next up is an overview of the Xend and XCS layers. These layers are the management layers that enable users to manage and control both the domains and Xen. Following it is a discussion of the communication mechanism between domains and of virtual devices. The Xen Project source code is quite complex, and I hope this may be a starting point for delving into it.
First, what is the Xend daemon? It is the Xen controller daemon, meaning it handles creating new domains, destroying extant domains, migration and many other domain management tasks. A large part of its activity is based on running an HTTP server. The default port of the HTTP socket is 8000, which can be configured. Various requests for controlling the domains are handled by sending HTTP requests for domain creation, domain shutdown, domain save and restore, live migration and more. A large part of the Xend code is written in Python, and it also uses calls to C methods from within Python scripts.
We start the Xend daemon by running from the command line, after booting into Xen, xend start. What exactly does this command involve? First, Xend requires Python 2.3 to support its logging functions.
The work of the Xend daemon is based on interaction with an XCS server, the control Switch. So, when we start the Xend daemon, we check to see if the XCS is up and running. If it is not, we try to start XCS. This step is discussed more fully later in this article. .
The SrvDaemon is, in fact, the Xend main program; starting the Xend daemon creates an instance of SrvDaemon class (tools/python/xen/xend/server/SrvDaemon.py.). Two log files are created here, /var/log/xend.log and /var/log/xend-debug.log.
We next create a Channel Factory in createFactories() method. The Channel Factory has a notifier object embedded inside. Much of the work of the Xend daemon is based on messages received by this notifier. This factory creates a thread that reads the notifier in an endless loop. The notifier delegates the read request to the XCS server; see xu_notifier_read() in xen/lowlevel/xu.c. This method sends the read request to the XCS server by calling xcs_data_read().
The creation of a domain is accomplished by using a hypercall (DOM0_CREATEDOMAIN). What is a hypercall? In the Linux kernel, there is a system call with which a user space can call a method in the kernel; this is done by an interrupt (Int 0x80). In Xen, the analogous call is a hypervisor call, through which domain 0 calls a method in the hypervisor. This also is accomplished by an interrupt (Int 0x82). The hypervisor accesses each domain by its virtual CPU, struct vcpu in include/xen/sched.h.
The XendDomain class and the XendDomainInfo class play a significant part in creating and destroying domains. The domain_create() method in XendDomain class is called when we create a new domain; it starts the process of creating of a domain.
The XendDomainInfo class and its methods are responsible for the actual construction of a domain. The construction process includes setting up the devices in the new domain. This involves a lot of messaging between the front end device drivers in the domain and the back end device drivers in the back end domain. We talk about the back end and front end device drivers later.
The XCS server opens two TCP sockets, the control connection and the data connection. The difference between the control connection and the data connection is the control connection is synchronous while the data connection is asynchronous. The notifier object, which was mentioned before, for example, is a client of the XCS server.
A connection to the XCS server is represented by an object of type connection_t. After a connection is bound, it is added to a list of connections, connection_list, which is iterated every five seconds to see whether new control or data messages arrived. Control messages, which can be control or data messages, are handled by handle_control_message() or by handle_data_message(), respectively.
The create() method in XendDomainInfo starts a chain of actions to create a domain. The virtual devices of the domain first are created. The create() method calls create_blkif() to create a block device interface (blkif); this is a must even if the VM doesn't use a disk. The other virtual devices are created by create_configured_devices(), which eventually calls the createDevice() method of DevController class (see controller.py). This method calls the newDevice() method of the corresponding class. All the device classes inherit from Dev, which is an abstract class representing a device attached to a device controller. Its attach() abstract (empty) method is implemented in each subclass of the Dev class; this method attaches the device to its front end and back end. Figure 2 shows the devices hierarchy, and Figure 3 shows the device controller hierarchy.
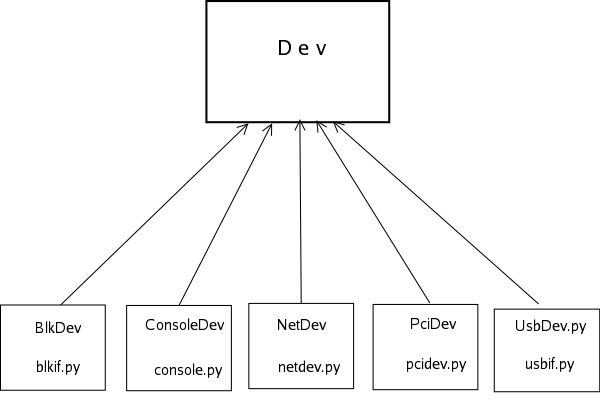
Figure 2
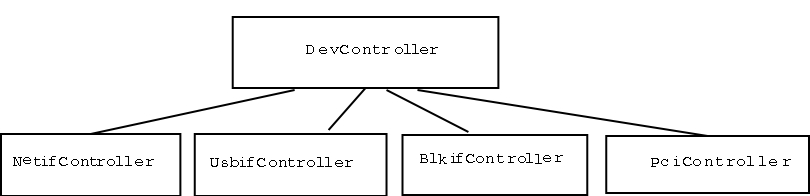
Figure 3
Domain 0 runs the back end drivers, and the newly created domain runs the front end drivers. A lot of messages pass between the back end and front end drivers. The front end driver is a virtual driver in the sense that it does not use specific hardware details; the code resides in drivers/xen, in the sparse tree.
Event channels and shared-memory rings are the means of communication among domains. For example, in the case of netfront device (netfront.c), which is the network card front end interface, the np->tx and the np->rx are the shared memory pages, one for the receiver buffer and one for the transmitted buffer. In send_interface_connect(), we tell the netback end to bring up the interface. The connect message travels through the event channel to the netif_connect() method of the back end, interface.c. The netif_connect() method calls the get_vm_area(2*PAGE_SIZE, VM_IOREMAP)). The get_vm_area() method searches in the kernel virtual mapping area for an area whose size equals two pages.
In the blkif case, which is the block device front end interface, blkif_connect() also calls get_vm_area(). In this case, however, it uses only one page of memory.
The interrupts associated with virtual devices are virtual interrupts. When you run cat /proc/interrupts from domainU, look at the interrupts with numbers higher than 256; they are labeled "Dynamic-irq".
How are IRQs redirected to the guest OS? The do_IRQ() method was changed to support IRQs for the guest OS. This method calls __do_IRQ_guest() if the IRQ is for the guest OS, xen/arch/x86/irq.c. The __do_IRQ_guest() uses the event channel mechanism to send the interrupt to the guest OS, send_guest_pirq() method in event_channel.c.
The Xen Project is an interesting and promising project that received increasing notice over the past year. The code is complex, especially the virtual memory management, the live migration implementation and the grant tables mechanism. This article is an introductory article, however, and does not deal with these topics. I hope, though, that it has provided a starting point to those who want to learn more and delve into the code.
Note: This article refers to Xen-unstable, xen-3.0-devel, which is the basis for Xen-3.0, which should be released soon. The kernel referred to for dom0/domU is a 2.6.* kernel. Whenever the term class is used, it refers to a Python class.
Rami Rosen is a Computer Science graduate of Technion, the Israel Institute of Technology, located in Haifa. He works as a Linux kernel programmer for a networking start-up, and he can be reached at ramirose@gmail.com. In his spare time he likes running, solving cryptic puzzles and convincing and helping everyone he knows to move to this wonderful operating system, Linux.
