
TALOSS: Three-Dimensional Advanced Localization Observation Submarine Software
The US military has adopted the concept of network-centric (net-centric) operations as a means to develop speed of command. Under this methodology, speed of command has three parts: 1) the force achieves information superiority, having a dramatically better awareness or understanding of the battlespace rather than simply more raw data; 2) the forces acting with speed, precision and reach achieve the massing of effects, not solely the massing of forces; and 3) the results that follow are the rapid foreclosure of enemy courses of action and the shock of closely coupled events.
A significant issue in this concept pertains to the effectiveness with which distributed military combat systems can be integrated operationally to yield maximum battlespace awareness for the battle force. Net-centric warfare requires a common operational/tactical picture; that is, there must be a reliable and consistent common tactical picture (CTP) across platforms to provide dominant battlespace awareness in the multiwarfare environment.
The challenge in achieving speed of command is developing rapid, accurate awareness and understanding of the entire battlespace. Traditionally and currently, decision-makers develop a mental model of the battlespace by assimilating data from multiple 2-D displays and paper plots. A net-centric, or distributed, environment demands a new approach for presentation of the battlespace—both in the level of detail and in the manner in which it is presented.
The TALOSS system is designed to enable the rapid and/or accurate assimilation of complex information in the undersea battlespace. TALOSS is capable of generating a common undersea tactical picture, which includes threat danger zone estimation, sensor contact tracking and one's own ship's position and orientation presented in combination with navigational/topographic/bathymetric information. It is hypothesized that this integrated undersea picture can enable faster and more accurate decision-making, as well as provide improved planning and decision aids.
TALOSS is compatible with and has been tested under Red Hat 7.0–9.0 as well as Slackware 9. Linux was chosen as the operating system for several reasons: 1) it is compatible with current and future submarine combat systems; 2) it is a generic UNIX operating system, which means software and script files developed under Linux are transferred readily to other UNIX operation systems, such as HP-UX and IRIX; and 3) it is an open-source operating system with a large user community that can be tapped easily for system optimization and maintenance. TALOSS is comprised of three main modules: the Feeder, the Bezel and the 3-D Display. Figure 1 is an architecture diagram of the baseline software.

Figure 1. Baseline TALOSS Architecture
Feeder is a program that reads in and sends submarine Combat Control System (CCS) data to the main display through TCP/IP sockets. The program can be linked directly to the combat database, or it can run reconstruction and demonstration data through ASCII input files. Feeder is a flexible module that can be reconfigured easily to import multiple databases. Because of this flexibility, the TALOSS system is compatible with non-submarine-related applications, such as oceanographic/topographic 3-D maps, 3-D velocity fields and 3-D radar/sonar maps, as well other applications involving objects moving in a 3-D environment.
The Bezel is an information/control GUI written using the Fast Light Tool Kit (FLTK). It controls the 3-D main application (Main App) and, to a limited extent, the Feeder program. In addition to its role as a system controller, the Bezel also serves as a system status indicator. One way it displays system status is through an Open Inventor 3-D window showing the top-down view of the battlespace centered about one's own ship, labeled ownship. It is essentially a 2-D view of the 3-D scene giving the user an orientation point into the 3-D scene from which to locate ownship's position and orientation rapidly. The Bezel and the Main App communicate to each other through Shared Memory. Figure 2 shows a complete TALOSS display featuring the FLTK control Bezel linked with the Open Inventor 3-D display.
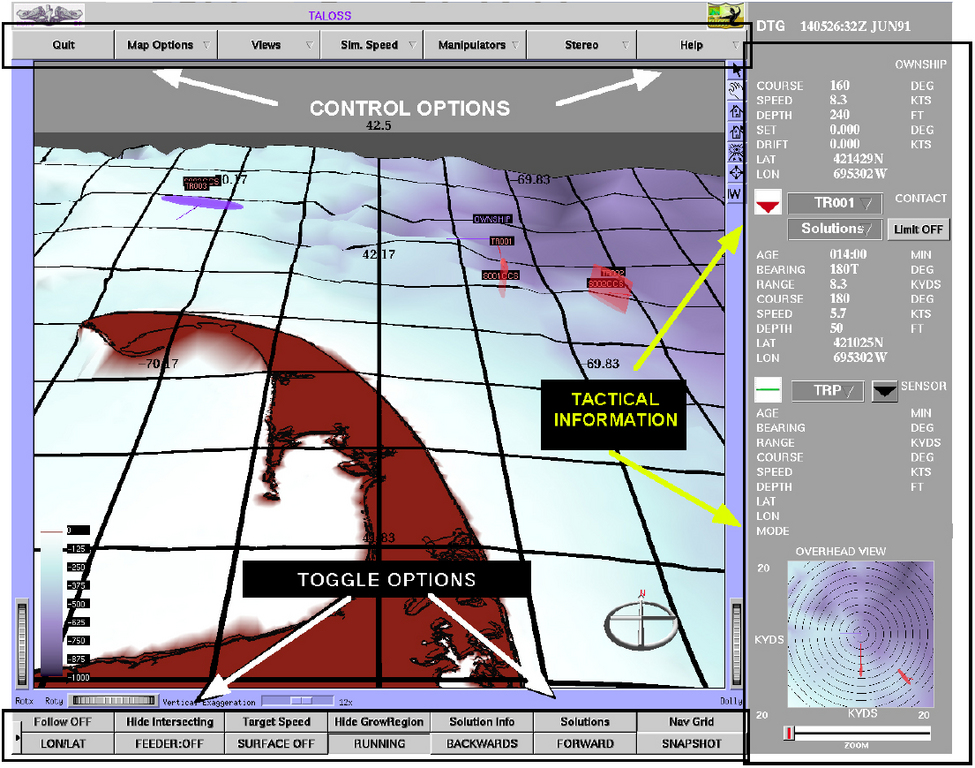
Figure 2. Complete TALOSS Display
In Figure 2, observe the pull-down menus at the top of the Bezel. They allow the user access to basic TALOSS functions, such as exiting the program, changing the view, changing the map color, changing the depth regime limits and so forth. Similarly, located on the bottom of the Bezel are two rows of toggle buttons that allow for the control of the tactical information presented on the 3-D display of the undersea battlespace.
The right side of the Bezel is distinct from the top and bottom in that its purpose is to provide pertinent tactical information, such as: 1) ownship, target and weapon information; 2) target and sensor selection status; and 3) numeric target containment region information. In addition, because the entire system is synchronized to a common operational clock, whose time is given in the Navy daytime group (DTG) format, that too is displayed on the top-right side of the Bezel. Figure 3 shows a representative illustration of the right side of the Bezel with corresponding feature description.
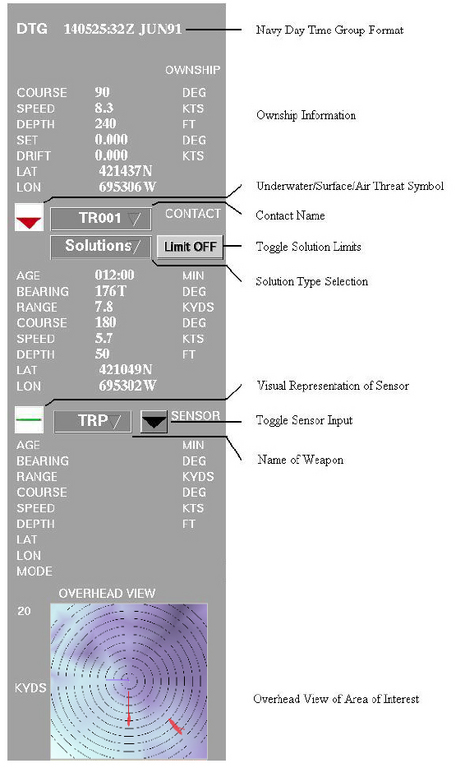
Figure 3. Right-Side Bezel Features
The 3-D undersea battlespace display receives its tactical information from the Feeder program. It receives mapping and navigational information from the Digital Nautical Chart database that is loaded at startup and updated based on the evolution of the tactical situation. All navigational information is pre-rendered as Open Inventor binary files, called Navigation Tiles. The Main App combines all tactical and navigation information into a comprehensive 3-D picture, rendering it using the computer platform-independent scenegraph, Open Inventor.
The lower-left corner of the 3-D display contains three scene interaction controls. The Rotx dolly rotates the scene about an imaginary x-axis running horizontally across the screen. The Roty dolly rotates the scene about an imaginary y-axis running vertically across the screen. The vertical exaggeration slider bar changes the depth ratio of the scene. This serves to exaggerate 3-D depth within the scene. To use any of these dolly wheels, simply place the mouse cursor over the dolly, depress and hold the left button while dragging the cursor in the desired direction. The lower-right corner of the 3-D display contains a zoom dolly. Zoom-in is limited to collision with the bottom, at which point zoom ceases.
In addition to scene manipulation devices, the 3-D display contains seven interaction buttons. The buttons perform functions such as selecting a contact, scene manipulation, resetting a home view and toggling a wire-frame view.
Some other 3-D display features of note are a free-floating 3-D compass that simultaneously indicates both direction and 3-D scene orientation and a colorbar that indicates depth shading. Depth shading is a combination of color map and depth regime selected. Figure 4 illustrates these features.
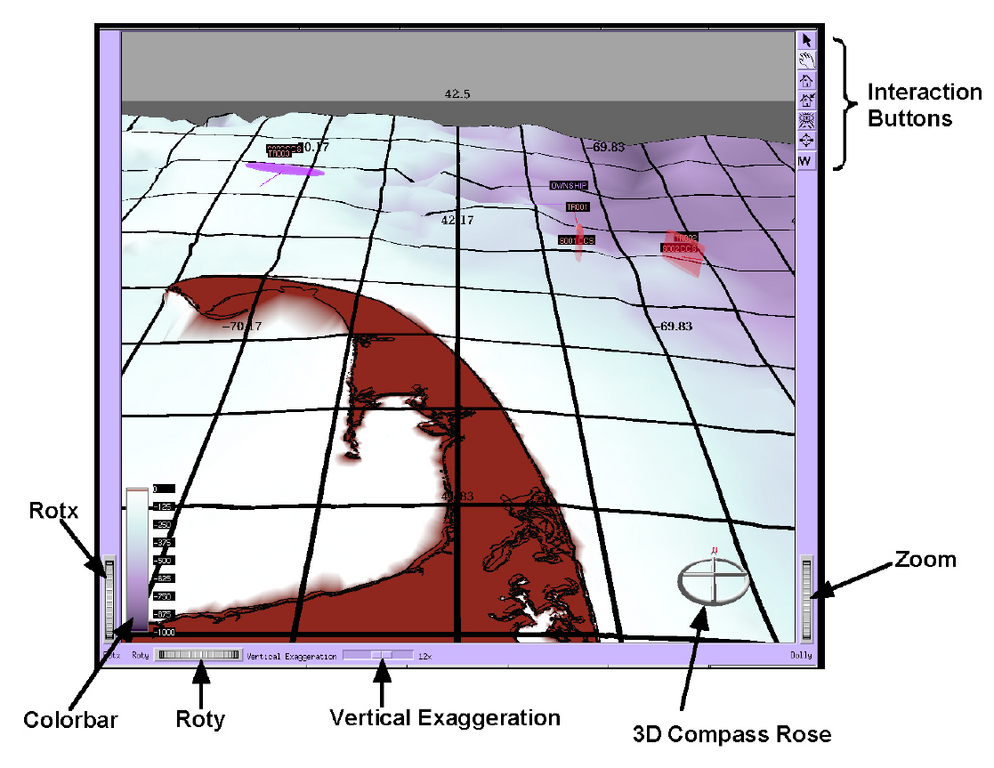
Figure 4. 3-D Display Features
The purpose of a tactical display is to give an operator a sense of the location of everything relative to the operator's own position. This is accomplished in TALOSS by a series of concentric range rings centered about ownship. The range rings represent set intervals that allow an operator to determine instantly, visually, how far any particular object is from ownship. This information is particularly important in collision avoidance and threat assessment. These rings are shown both in the 3-D display and in the top-down view shown in the Bezel.
An essential component of any tactical or situational awareness display is precise knowledge of location on the earth. TALOSS supports navigational information using two methods. The first is a system of navigational grid markers that are ten degrees of latitude and longitude. Because distance is equal for all latitudes, this amounts to ten nautical miles for latitude. Because the distance between longitude lines varies with latitude, the number of nautical miles between longitude lines is dependent on latitude. For temperate latitudes, it is approximately ten nautical miles. Second, in addition to the lines of constant latitude/longitude, an alphanumeric value appears on the 3-D map indicating latitude and longitude. These values and the navigational grid lines are extracted from the Digital Nautical Chart database. The navigation grid toggles with the range ring display; however, the alphanumeric markers are always displayed. Figure 5 shows a view of the 3-D display with all navigational information enabled.
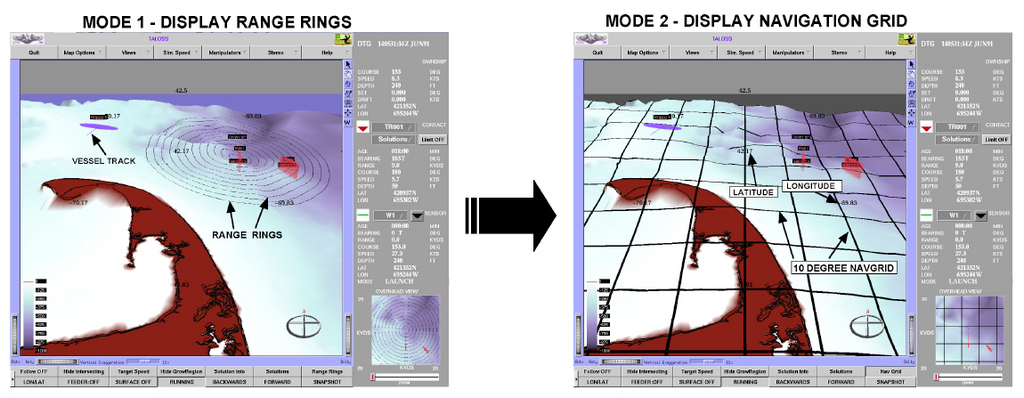
Figure 5. Navigation and Tracking Information
The most important component of a situational awareness display is the ability to track and to integrate all moving objects visually. In TALOSS, solid lines indicate the estimated tracks of all known objects. Associated with the tracks is a color scheme indicating intent, which can be hostile, friendly or neutral. The respective colors for these classifications are red, blue and yellow. Because the current version of TALOSS is designed for submarine applications, it also includes tracks for weapons, both ownship's and hostile. The coloring scheme is green for ownship's weapons and orange for hostile weapons. This color scheme, however, is easily modified for other applications. Figure 5 illustrates tracks on several contacts as well as ownship. All contacts have their tracks labeled as defined in the contact window of the Bezel.
In addition to tracking information, TALOSS does bookkeeping for potential danger zones as 3-D containment regions. The same color schemes used for tracks apply to these containment regions: red, blue and yellow. Figure 6 indicates a typical 3-D containment region. Containment regions are computed and displayed as complex volumetric shapes. Containment region selection is controlled by the Bezel. The Bezel allows for both containment region highlighting and selection of the contacts contributing to a particular containment region.
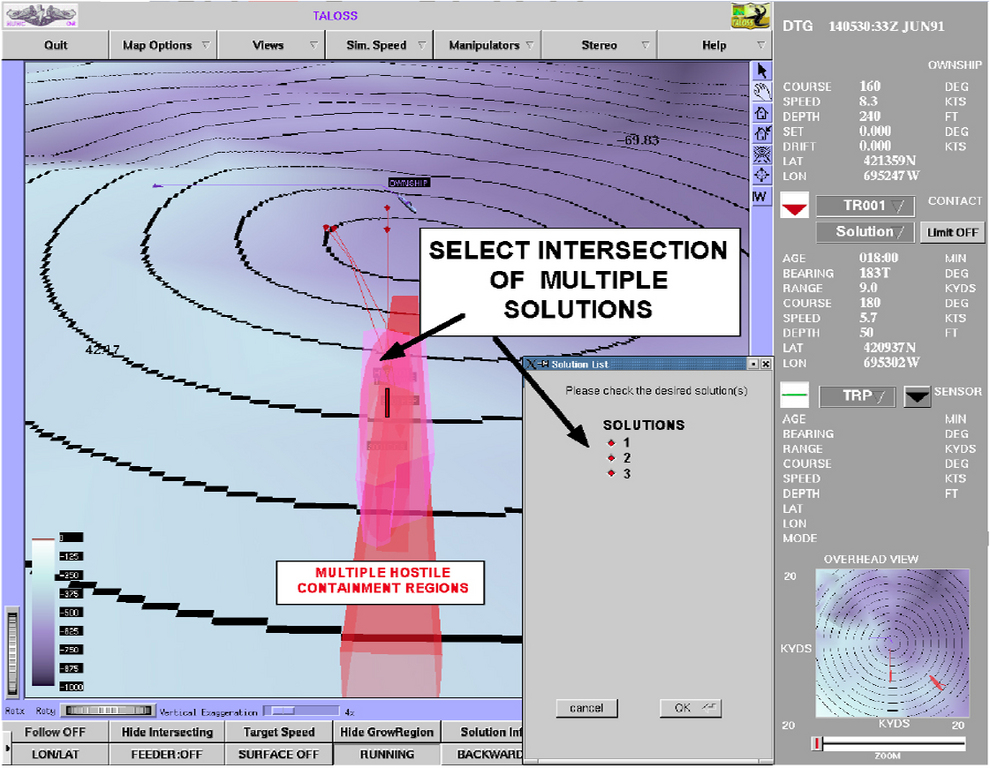
Figure 6. 3-D Containment Region
Containment regions can be grown and intersected to mimic a vessel's movement over time. Growth of the regions represents all possible locations the vessel could occupy within the containment volume when precise sensor contact on that vessel is lost. When a sensor update on the vessel is obtained, that updated information, in the form of new 3-D containment volume, can be intersected with the previously grown 3-D volume to extract a much-reduced common volume (see Figure 7). This common volume has the highest probability of containing the vessel of interest. The goal of a military combat system is to “localize” the threat containment volume rapidly, so an appropriate tactical response can be precipitated expeditiously. In other words, fight or flight.
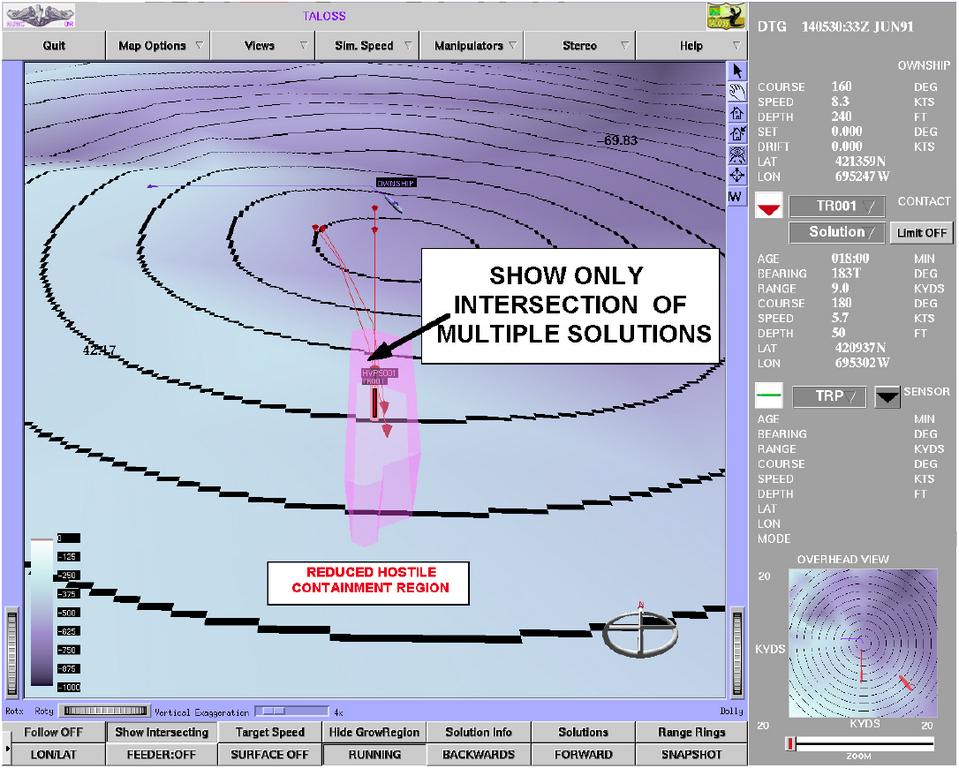
Figure 7. 3-D Intersection Region
Pioneering software in the intersection of two or more noncontiguous volumes has been developed for TALOSS by Arizona State University. One of the main advantages of using the Linux operating system for software development is that research into specific areas of interest can be done inexpensively at universities or other open-source sites. Using Linux means that the participating research partners do not need to buy expensive development platforms, such as Hewlett-Packard TAC or Silicon Graphics workstations. Instead, they can develop code easily integrated into a combat system on inexpensive Linux-based PC systems. The US government is encouraging the use of commercial-off-the-shelf (COTS) products for development and deployment in the US military, both as a cost-saving measure and as a means for ensuring widespread long-term support of the product. Using Linux as both a development and operational environment for military systems is a perfect example of COTS in action.
A flexible, modularized, 3-D data fusion visualization system has widespread applicability for both military and civilian applications. Under the sponsorship of the Office of Naval Research (ONR), the Naval Undersea Warfare Center, located in Newport, Rhode Island, has created such a system for the visualization and integration of the submarine undersea battlespace. This system, TALOSS, has been designed to integrate a wide variety of the databases, both civilian and military. Because the software is modularized and written to run under Linux, it has the potential for transition as an open-source rendering and data fusion engine.
The ultimate aim of the project, funding permitting, is to develop a completely modularized TALOSS toolkit, unclassified portions of which will be made available for civilian use as open-source software. There are two primary motivations for this release: 1) the software was developed with public funds and should be made available to the general public if national security is not compromised, and 2) by making the unclassified portion of the software available, it is hoped that improvements in its operation by the Open Source community can be incorporated into the classified portion of the software enhancing its operation.
Resources
“Naval Transformation Roadmap, Sea Strike, Sea Shield, Sea Basing”, Department of the Navy, Washington, DC, 2002 (UNCLASSIFIED). Available on-line at spica.gl.nps.navy.mil/ORarchives/SEA-TRIAL/NavalTransformRdMap.pdf.
K. Lima, “Visualization for Multiwarfare Planning and Execution”, ONR Command and Control & Combat Systems Gathering 2002, Arlington, Virginia, April 23–25, 2002 (UNCLASSIFIED).
G. M. Nielson and G. L. Graf, “Application of Volume Modeling Techniques to Dynamic Containment Regions for Naval Applications”, Interim Progress, ONR Grant N0014-02-1-0287, Arizona State University, Phoenix, Arizona, May 15, 2002 (UNCLASSIFIED).
R. Shell, L. Mathews, K. Lima, R. King and F. Das Neves, “Undersea Command and Control Visualization”, July 22–26, 2001, Proceedings of the Seventh Annual Joint Aerospace Weapon Systems Support, Sensors, and Simulation Symposium & Exhibition (JAWS S3), San Diego, California, 2001, p. 8.
Douglas B. Maxwell is currently a member of the Weapons and Countermeasures branch (Code 2213) of the Naval Undersea Warfare Center. He received his MS in Mechanical Engineering (2001) from Louisiana Tech University.
Richard Shell is an electrical/computer engineer at the Naval Undersea Warfare Center Division, Newport, Rhode Island. Richard Shell's current work in 3-D visualization has resulted in an invited paper and presentation at the Joint Aerospace Weapons System Support, Sensors and Symposium (JAWS S3) in 2002 as well as a paper/poster presentation at the European Undersea Defense Technology Conference (UDT), La Spezia, Italy, in 2002.
