
The Linux Softsynth Roundup
Software sound synthesis (SWSS) has an honorable lineage in the history of computers. Early experiments in digital sound synthesis took place at the famous Bell Labs, where a team of researchers centered around Max Mathews created the Music N series of audio synthesis software, culminating in Music V in 1969. Since that time, Music V has evolved into a series of notable digital sound synthesis environments, such as Csound, Cmix/RTCmix and Common LISP Music. These environments typically provide the user with a language for specifying the nature of sonic events, such as musical notes or sampled sounds. These languages usually present users with a distinction between instruments (the sound-producing designs) and scores (event characteristics, such as, start time, duration and synthesis parameters). Users compose their instruments and scores in their preferred SWSS language and then feed them to the language's compiler. Output is directed to a file, which then can be played by any sound system supporting the file format or, with sufficiently powerful hardware, the output can be directed to a digital-to-audio converter for rendering real-time audio output.
A standalone software synthesizer (softsynth) substitutes real-time control for the score aspect of the model above. Softsynths typically come with attractive GUIs, often emulating the appearance and operation of a hardware synthesizer, and a MIDI keyboard or external sequencer is the expected controller. Under the right circumstances, a softsynth can be controlled by a concurrent process. For example, using the ALSA aconnect utility, a softsynth can be wired to a MIDI sequencer running on the same machine. Then, sequences can be recorded and played via the softsynth, eliminating the need for an external synthesizer and containing the MIDI environment on a single computer.
A softsynth can be dedicated to a particular synthesis method (additive, subtractive, FM, etc.), or it can be open-ended and modular. In short, additive synthesis works by summing sine waves with varying frequencies, amplitudes and phases until the desired sound is attained. Additive synthesis is a computationally expensive synthesis method with a formidable amount of detail required for realistic sounds. Subtractive synthesis begins with a sound source rich in frequencies (such as a sawtooth wave or noise), then filters frequencies out until the desired sound has been sculpted from the original source. Subtractive synthesis is relatively easy to implement in hardware and software, and its sounds are characteristically associated with the analog synthesizers of the 1970s. FM (frequency modulation) synthesis works by shaping the frequency components of one oscillator by the output of another, creating complex audio spectra with little computational expense. Yamaha's DX7 synthesizer is the most famous FM implementation, and the company's OPL3 sound chip is certainly the most infamous.
Physical modelling and granular synthesis are two more recent synthesis methods. Physical modelling synthesis models the mechanics of a real or imaginary instrument and the physics of its activation. The method's parameters are based less on familiar sono-musical models, such as waveforms, frequencies and amplitudes, and more on the characteristics of physically excited systems, such as airflow through a tube, the vibrations of a plucked string or the radiating patterns of a struck membrane. Physical modelling has become a popular synthesis method and is deployed in synthesizers from Korg, Yamaha and others. Granular synthesis creates sounds by ordering sonic quanta or grains into more or less dense sonic masses. Again, its parameters are not so intuitive as in the older synthesis methods, but it is powerful and can create a wide range of sounds. Granular synthesis has yet to find its way into a popular commercial synthesizer, but hardware implementations are found in the Kyma system and the UPIC workstation.
A softsynth can be dedicated wholly to a single synthesis method, it can be a hybrid of two or more methods, or it can take a more open-ended modular design. Each architecture has its strengths. Broadly speaking, the modular design is perhaps the most flexible, but it may sacrifice fineness of control (resolution) for generality of purpose. A dedicated-method softsynth lacks the modular synth's flexibility but usually provides much finer parameter control.
Modular synthesizers encourage a building-block approach by providing separate synthesis primitives for connection in arbitrary ways. For example, an oscillator's output can be directed to the input of an envelope generator (EG) or vice versa, routing the EG's output to an oscillator input. This kind of black box networking lends itself to software emulation, as we'll see when we meet some modular synths later in this article.
The distinctions between the general types of software are blurring. For example, Csound is now available with a set of FLTK-based widgets for user-designed control panels. Many users already have created elaborate GUIs for Csound's various synthesis methods, some of which are detailed enough to function as standalone Csound-based softsynths. This trend is likely to continue with GUIs evolving for the Common LISP Music and RTCmix SWSS environments.
Graphic patching SWSS environments like jMax and Pd are another indicator of this blurring tendency. They also provide graphics widgets that can be used to construct synthesizer interfaces, but unlike Csound, these widgets are an integral aspect of the basic working environment. jMax and Pd utilize a unique combination of graphics and language primitives that are patched together by virtual wires to create a synthesis or processing network. These environments certainly can be employed as softsynths, but their generality of purpose places them closer to Csound than to the softsynths reviewed here.
Beatbox-style synths are yet another softsynth design category. These programs combine elements of a synthesizer, a drum machine and a sequencer for an all-in-one accompaniment package, though the more sophisticated examples are truly more flexible music composition systems.
These distinctions are brief, but for this article they suffice to indicate the basic types of softsynths. For complete definitions of the various synthesis methods and synthesizer architectures, see the standard references listed in Resources.
If you've ever used Adobe Photoshop or The GIMP, you're already familiar with the concept of plugins. For normal users, a plugin architecture extends a program's capabilities without requiring an update or a recompile. For applications programmers, a plugin architecture allows them to concentrate on the basic design of their programs, letting the plugins provide more extended or advanced features.
Musicians working with Windows/Mac audio software can use plugins written to the Steinberg VST and Microsoft DirectX plugin APIs. Linux does not directly support either of those APIs, although we shall see an indirect method of support that does work under WINE. However, Linux audio developers have come up with their own native plugin architecture called the Linux Audio Developers Simple Plugin Architecture (LADSPA). The LADSPA API has become a standard, and support for it is now an expected aspect of almost any new Linux audio application. Some outstanding collections of LADSPA plugins are available that include not only the typically expected effects and DSP but also synthesis building blocks (oscillators, envelope generators, filters, etc.) and even some fully formed plugin synthesizers. There are some notable non-LADSPA plugins too.
Peter Hanappe's iiwusynth is a lightweight synthesizer that uses SoundFonts as fuel for its synthesis engine. Given a decent set of SoundFonts, iiwusynth's output is very good, and it has become popular as an embedded synth in many applications. It also can be used as a standalone synthesizer from the command line.
RX/Saturno is another lightweight plugin synthesizer that emulates the popular Yamaha DX7 FM synthesizer. Developer Juan Linietsky has indicated that RX/Saturno is still in the initial development stage, but it already is quite useful and can be employed as a plugin synth in any program supporting the ALSA sequencer.
Kjetil Matheussen's vstserver is interesting software that uses the capabilities of WINE to fool VST plugins into believing they're working in their native Windows environment. In most cases, performance is excellent, at least as good as under Windows. Kjetil also has written two clients for the server, one to hook VST plugins into Pd and one for LADSPA. The vstserver also supports some VSTi plugins, which are fully formed instruments such as synthesizers, samplers and MIDI sequencers wrapped into the VST plugin architecture.
Although LADSPA is an effective and popular standard, the “simple” aspect of its design prohibits certain kinds of processing and control. LADSPA plugins themselves do not permit direct parameter control via MIDI; though the plugins are quite usable in a MIDI sequencer such as MusE. Once again, the Linux audio development community has risen to the challenge with a new proposed standard called XAP. The API is in the design stages, but the team working on XAP includes the LADSPA designers and other talented Linux audio programmers.
The MIDI input hardware is typically a MIDI synthesizer keyboard, but any MIDI instrument can be used. Connection to a standard sound card requires a MIDI interface cable. OSS/Free and ALSA support MPU-401-compatible devices, so some standalone MIDI cards will work also. ALSA provides direct support for serial port and USB MIDI devices (I have not tested those connections myself) as well as the very useful virmidi virtual MIDI ports.
On the software side, the basic OSS/Free Linux sound system (the kernel sound system) is sufficient for working with the softsynths described here, but the recommended system includes the ALSA library and drivers, the JACK audio connection kit and a hardware MIDI input device. For best response, the kernel should be compiled for low latency, optionally with the preemptive kernel patch. The real-time clock (RTC) should be enabled also.
As of the 2.5 kernel development track, the OSS/Free sound system has been officially replaced by ALSA. Stable kernels from 2.6 onward will build only the ALSA system, which does have an excellent OSS/Free emulation layer for compatibility with non-ALSA-aware applications. Kernels earlier than 2.5 include the OSS/Free system, so users of those kernels must build and install ALSA themselves. ALSA has been designed for the kind of interconnectivity common to a modern sound system. ALSA provides API support for plugins, an advanced audio client/server architecture and a set of utilities to ease system configuration and management.
4Front Technology's proprietary OSS/Linux also works well with Linux softsynths, though obviously it can't take direct advantage of a network of ALSA sequencer clients.
JACK is a recursive acronym for the JACK Audio Connection Kit. It has been designed for low latency professional-grade performance as a software bus for the connection of out-of-process audio applications. JACK is somewhat similar in purpose to sound servers such as the aRts server for KDE or GNOME's esd, but JACK has been designed as a more robust solution incorporating pro-audio standards. Programs playing on the JACK bus can route their audio I/O freely between one another, permitting complex scenarios, such as routing the output of a MIDI-controlled softsynth into a hard-disk recorder while applying modulated plugin effects, all in real time with low-latency. Though a relative newcomer to the Linux audio world, JACK already has caught the attention of many developers and users, and we are rapidly approaching the point where its deployment and use will be a matter of course for Linux audio programmers and normal users alike.
The testing hardware included a generic machine with an 800MHz AMD Duron CPU, 512MB RAM and a 15GB IDE hard disk. The audio hardware consisted of two sound cards, a SoundBlaster SBLive Value and a SoundBlaster PCI128; a Casio CZ101 synthesizer was used for external MIDI keyboard input. I used Steve Ratcliff's pmidi MIDI file player, and I also employed a second computer running Voyetra's Sequencer Plus Gold under MS-DOS. The video system included a generic 19" monitor and a Voodoo3 graphics card. Audio output from the sound cards ran to a Yamaha DMP7 mixer then out to a 100-watt QSC power amplifier and a pair of Yorkville Sound YSM-10 reference speakers.
The low- and middle-level software included Linux kernel 2.4.5 patched for low latency, the ALSA 0.9.0rc6 package (audio library, drivers and utilities), the latest JACK and the LADSPA plugin sets from Richard Furse and Steve Harris. Other support software included Maarten de Boer's alsamixergui and Bob Ham's ALSA MIDI patch bay, both of which provide GUIs (and more) for the ALSA alsamixer and aconnect utilities.
Many of the synths profiled here include the recommendation to be run with root permissions, either as root yourself or by making the binary suid root. Doing so usually ensures a higher priority for the running application but is also considered a serious security risk if the user is on a network.
Apart from the security issues, I should explain that when a real-time process runs away from the root user the outcome is not pretty, and your machine may lock up entirely. In one test while running as root user, simply specifying an unrecognized MIDI device froze my system. So be warned. Running as root can indeed enhance performance, but you also are running risks. Run normal applications as a normal user as much as possible.
The Software Synthesis section of the Linux Sound & Music Software site includes a subsection of Softsynths & Samplers. More than 30 URLs are currently active, taking you to a variety of software synthesizers. Table 1 has pruned some of that variety by focusing on synthesizers capable of polyphonic (plays many notes at once) real-time output, ignoring off-line synthesizers and environments such as Csound or RTCmix. Due to their real-time nature, I have included beatbox programs and the MAX-like environments of Pd and jMax.
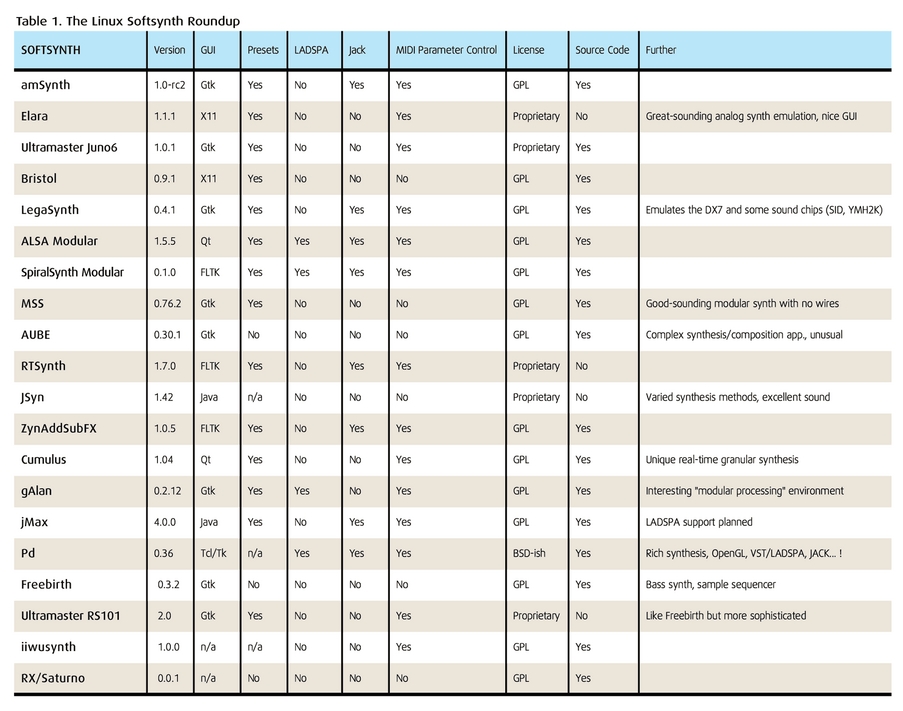
Table 1. The Linux Softsynth Roundup
Because this article is a roundup and not a shoot-out, I'll profile only some selections from Table 1 and prune it a bit more. The profiles represent a cross section of the various synthesis methods, but I have purposely focused on the standalone softsynths.
Nick Dowell's amSynth is an excellent representation of the dedicated subtractive synthesis architecture. The signal flow is fixed in a classic design. The output of the two oscillators is routed through a filter and an amplifier, then that signal can be given to the effects (amSynth provides reverb and distortion) and/or modulation stages for final processing before heading to your sound card digital-to-analog converter (DAC). In classic synthesis, the main parts of this design are referred to as the VCO (voltage-controlled oscillator), the VCF (voltage-controlled filter) and the VCA (voltage-controlled amplifier).
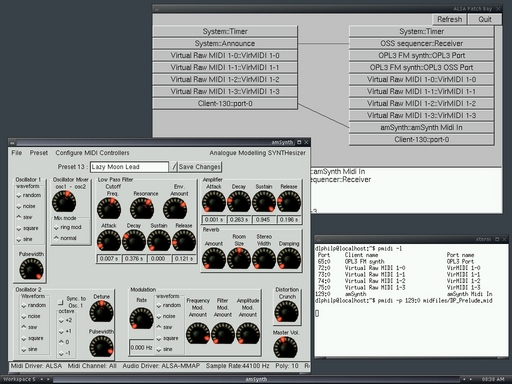
Figure 1. amSynth
amSynth includes some great-sounding presets. No General MIDI patch is set to support the General MIDI standardized map of instruments, but it does respond to incoming MIDI Program Change messages. Because amSynth is essentially a standalone single instrument that handles only one MIDI channel at a time, it is perhaps best used as a lead or pad instrument. It can be driven by a MIDI sequencer.
The full name for amSynth is Analogue Modelling Synthesizer. There are no real voltage-controlled components, so we might rightly wonder if Nick has been able to achieve his goal of modelling the sound of an analog subtractive synth. I'm happy to report that the sounds from amSynth are fat and lively, but you need not take my word for it. The excellent demos on the amSynth home page show off its sounds far better than I can describe here.
Dr Matthias Nagorni has written a variety of useful applications and utilities for ALSA, JACK and LADSPA; however, his current crowning achievement must be his wonderful ALSA Modular Synthesizer (AMS). This software emulates the great modular synths of yesteryear, providing the user with a large selection of modules to choose from.
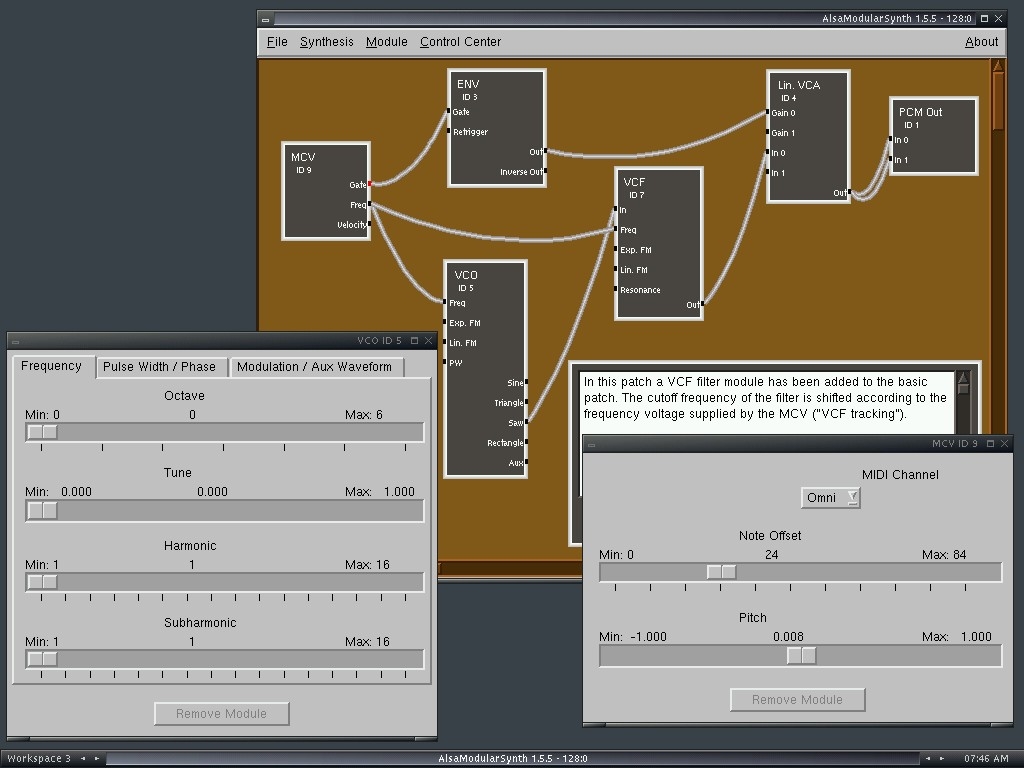
Figure 2. ALSA Modular Synth (AMS)
Figure 2 illustrates AMS in its most basic form. In a subtractive synthesis patch, the routing essentially is identical to that used by amSynth, but the difference lies in the greater flexibility of AMS. Unlike the fixed design of amSynth, AMS is completely flexible with regard to the connections between its various modules.
Most modules cheerfully accept arbitrary input connections and have little or no concern for the destination of their own outputs. But beware; when modules are connected in atypical configurations, the output can be quite unusual or even overpowering, so take care with your system volume control when testing such patches. Each module has its own dialog (shown in Figure 2), which is opened by right-clicking over the module's name.
Dr Nagorni supplied the following informative notes:
AMS implements special features to ensure that all three major synthesis methods [additive, subtractive, FM] can be easily used with it. The module Dynamic Waves implements additive synthesis of up to eight oscillators in one single module. Each harmonic can be shaped with an eight-point envelope, and the envelopes are graphically visualized. To enable easy access to integer harmonic tuning, useful for FM, VCOs have an additional harmonic and subharmonic slider. There is also the required linear FM input port. For subtractive synthesis to work properly, it is crucial that control voltages obey the classical logarithmic convention of 1V/Octave. This way, you can move the filter cutoff wherever you like, and you can still have perfect VCF tracking. Log Frequency is also useful at other places, including vibrato with an LFO.
AMS has been designed for real-time work. It is especially well-suited for MIDI control, and most parameters can be linked to a MIDI controller for real-time changes. AMS can be used equally well as a monophonic or polyphonic synth, and multiple instances of AMS may communicate over JACK to create a multi-timbral setup. Its support for the LADSPA plugins extends its already rich feature set, making AMS an ideal solution for those of us without access to a hardware synthesizer. A complete MIDI composition environment can be built from nothing more than a reasonably fast machine, one of the fine Linux MIDI sequencers, such as MusE or Rosegarden, and AMS.
Some setups will work better than others, so the good doctor has prepared a healthy supply of sample patches for your study and experimentation. You can hear some of them in the demo files available from the AMS home page, but as with all the synths profiled here, I suggest you download and install it yourself to see and hear what really it can do.
First there was SpiralSynth, then there was the SpiralLoops program, a cool looping sequencer, and then there was the SpiralSynthBaby, designed to be a plugin for SpiralLoops. Finally, developer Dave Griffiths decided to roll all of them into one open-ended modular synthesizer construction kit called SpiralSynth Modular (SSM). Like AMS, SpiralSynth Modular provides the user with a canvas and a palette of modules for placement and connection on the canvas, but SSM has its own unique design and sound-producing capabilities.
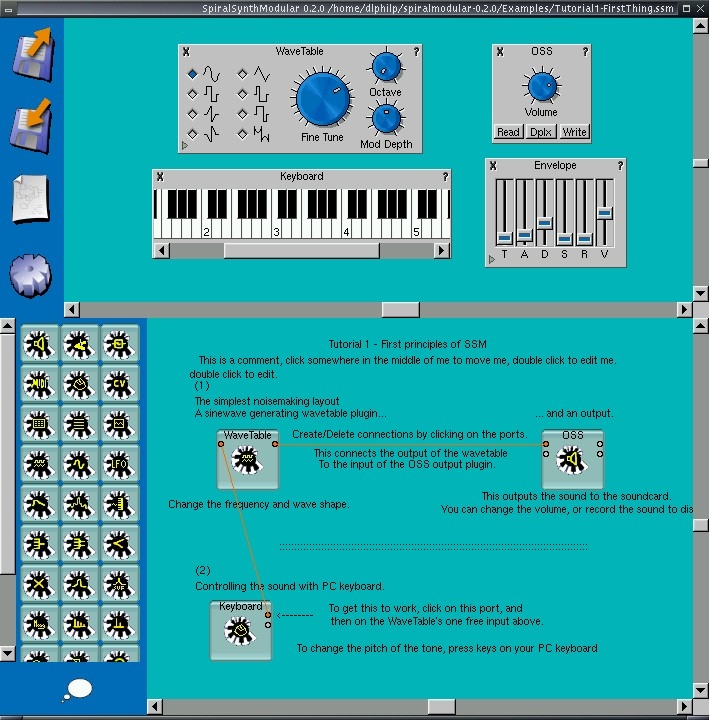
Figure 3. SpiralSynth Modular
Figure 3 shows off SSM running its first tutorial patch. This example shows a simple type of synthesis called wavetable synthesis. The wavetable is a predefined stored waveform (sine, square, triangle, pulse, etc.) that is triggered by the virtual keyboard and modified by the envelope generator before heading out to the sound card DAC through the OSS output module. In the example, we can see that the synthesizer is played through the computer keyboard, but SSM also provides a MIDI module for receiving and routing MIDI messages. The keyboard module is a nice touch, and I had great fun with it playing SSM from my laptop's QWERTY keys.
SSM does not function as a native ALSA sequencer client, so it cannot be wired directly to an ALSA port like amSynth or AMS. However, it can be hooked to the standard OSS/Free MIDI device (/dev/midi) for input from any hardware or software connected to that device. If your machine has no MIDI hardware, you can employ ALSA's virmidi virtual MIDI ports by setting the MIDI channel to the appropriate port in the SSM Options (/dev/snd/midiC1D0 for my laptop; see Figure 4). This enables connection to other ALSA-aware processes through aconnect or the ALSA patch bay.

Figure 4. SSM Options
Dave Griffiths has thoughtfully provided some excellent demos of the synth on the SSM home site. Its FLTK interface is pleasant and easy to use, the program includes a generous share of interesting and useful modules, including LADSPA support, and the latest version can be built with support for JACK. Dave plans to include a much-improved plugin version of SpiralLoops for a soon-to-arrive version of SSM, and we can expect more direct support for ALSA as well.
Stefan Nitschke's RTSynth is one of my favorite softsynths. It is another excellent example of the patcher synth. A main canvas is presented, iconic modules are deposited and connected together on the canvas, and right-clicking on a module opens a dialog for editing its parameters. RTSynth is the only softsynth represented here that creates its sounds via physical modelling.

Figure 5. RTSynth
Physical modelling synthesis is capable of extremely realistic sounds. Some of RTSynth's patches are quite convincing. The examples on the RTSynth home page show off some amazing acoustic and electric guitar sounds in full arrangements with bass, drums and keyboards. RTSynth is a multi-timbral softsynth, complete with drumkits and effects processing, and the demos really showcase its capabilities as a single-solution softsynth.
RTSynth is ALSA- and JACK-aware. It is fully MIDI-capable under ALSA and the older OSS/Free kernel sound modules. On systems lacking the ALSA drivers, it is still possible to connect RTSynth to external processes, such as a concurrently running MIDI sequencer via the UNIX mechanism known as a named pipe. A named pipe provides an easy method of interprocess communication for programs that may have no other way to share data. Using RTSynth as an example, here's how you set up a named pipe.
First, create the pipe with the mkfifo utility:
mkfifo $HOME/tmp/midififo
Next, prepare RTSynth for receiving data from the pipe:
RTSynth < $HOME/tmp/midififoFinally, you must indicate the named pipe as the preferred output device for the driving application. In the following example, I've used Simon Kagedal's clavier virtual keyboard:
clavier -o $HOME/tmp/midififoNow you can play RTSynth directly from the virtual keyboard. You also can use a normal, unnamed pipe to route the output from a process into RTSynth using this type of command:
cat foo | RTSynthThese connectivity strategies are particularly effective in the absence of MIDI hardware and/or the ALSA virmidi driver.
Nick Copeland is perhaps best known for his SLab hard-disk recording system, but he also has given us the Bristol Synthesizer Emulator. This softsynth provides GUIs and synthesis engines for emulations of the Mini Moog, Moog Voyager, Sequential Circuits Prophet-5, Roland Juno-6 and Yamaha DX7 synthesizers. It also provides graphic interfaces and engines for the Hammond B3 and Vox Continental organs and the Fender Rhodes electric piano. Bristol even emulates a generic mixing board and the Yamaha Pro10 digital mixer, but they were not tested for this review.

Figure 6. Bristol
As shown in Figure 6, the GUIs are nicely drawn, but they are more than mere eye candy. Nick has emulated the controls and functions found on the original synths as much as possible; however, not all of a particular synth's features may be implemented yet, and Nick notes that some emulations (notably the DX7) still need some work. Meanwhile, all those switches and knobs and wheels can be flipped, twirled and rotated in real time with smooth response and fast parameter updates. Bristol accomplishes a rather daunting task by providing not only the look-alike graphics for its variety of synthesizers and keyboards but the sound-alike synthesis engines as well.
Running Bristol with ./startBristol -v -h lists the runtime options to give the synth a wide degree of performance customization. For example, I started Bristol with ./startBristol -alsa -seq -bufsize 2048 -voices 6, which launches Bristol in its default Mini Moog mode, declares ALSA as the driver source, registers Bristol with the ALSA sequencer, sets the sound-card buffer size (the default value is 1,024, but Nick recommends 2,048 for my SBLive) and restricts the polyphony to six voices (Bristol's default polyphony is 16 voices). Incidentally, Bristol can be run in multiple instances with simultaneous control, effectively letting you layer synths exactly like we did in the old days.
I would need much more space to describe each of Bristol's interfaces adequately. The example I've placed at www.linux-sound.org/sounds demonstrates only the Mini Moog emulation, but it should give you an idea of what you can expect from this synth engine—some old-school synthesizer fun.
This synth is an excellent example of an emulated hardware synthesizer. The Juno6 keyboard and panel controls are faithfully rendered, and like the Bristol synth, all controls are active and available for manipulation at any time. I've owned a Juno6, and Ultramaster's audio emulation is quite faithful to the original, but with the stability of intonation of a digital synth. Best of all, the arpeggiator works. Those of us who remember such amenities probably will have great fun with this feature; alas, arpeggiators are not so common anymore, so newbies can expect to while away many an hour finding interesting and fun uses for this function.
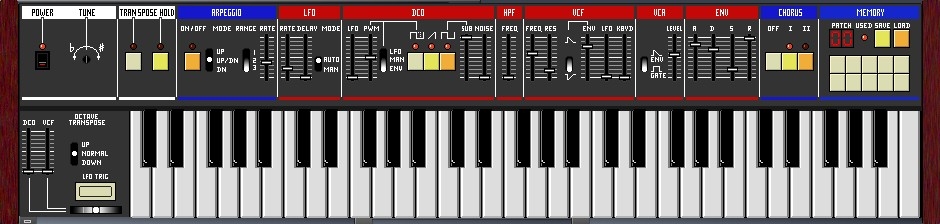
Figure 7. Ultramaster Juno6
The Juno6 is a straightforward implementation of subtractive synthesis, lending itself to sounds with dramatic filter sweeps. A short example WAV file can be found on the Ultramaster home page, but you'll learn more about the synth's sound and capabilities simply by playing around with it.
Paul Nasca's ZynAddSubFX is an interesting hybrid of additive and subtractive synthesis, with an added effects section for further processing. If that's all ZynAddSubFX offered, it still would grab your attention. An excellent FLTK interface invites experimentation with the various parameters of the synthesis strategies, and as an ALSA-aware client, you can drive the synth from your favorite MIDI sequencer. Figure 8 shows ZynAddSubFX working with the pmidi MIDI file player. It also shows ZynAddSubFX's Scales dialog opened to a collection of tunings from the Scala program. Selecting a new scale automatically updates the current patch's tuning, which invites exploration of unusual intonations and induces some interesting changes upon familiar material.
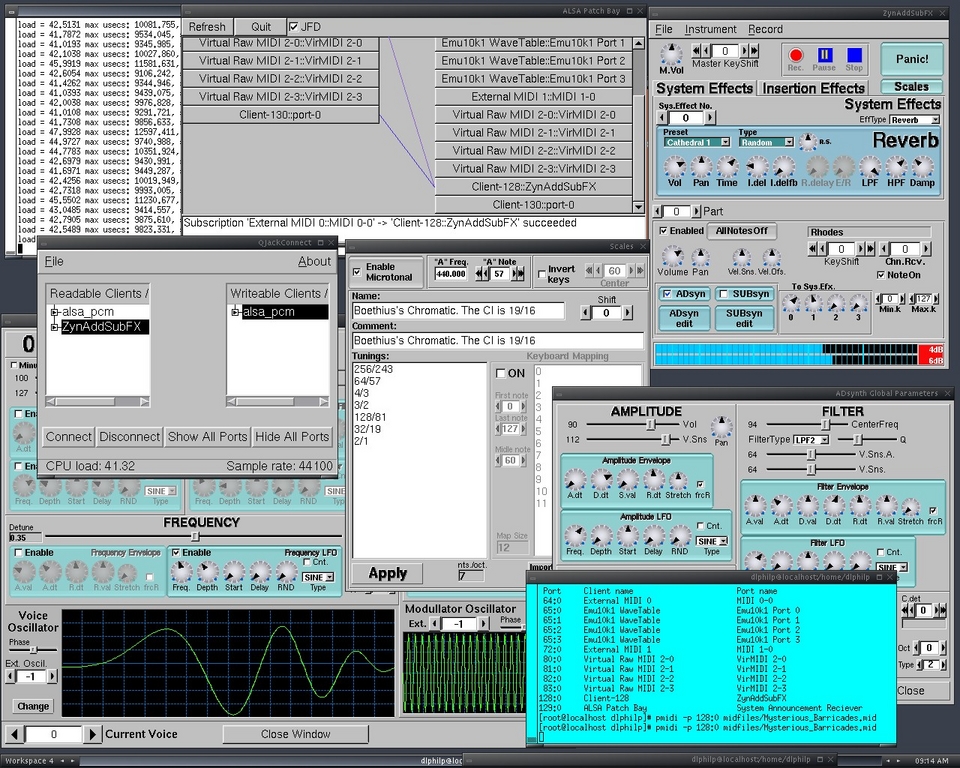
Figure 8. ZynAddSubFX
ZynAddSubFX is multi-timbral, with a different instrument per MIDI channel, making it another good choice for an all-purpose softsynth (minus drums, alas). Its sounds are created by straightforward synthesis methods, but the deployment of those methods and the program's excellent interface combine to help make some fine sounds. Performances can be recorded directly within ZynAddSubFX, and the developer has placed several demos on-line that depict the synth's power as a standalone multi-timbral softsynth. ZynAddSubFX is the newest softsynth profiled here, but its development is steady. As this article was being written, I learned that ZynAddSubFX is now JACK-aware (Figure 8), so with support for scales and tunings from Scala, the ALSA sequencer client configuration and JACK connectivity, this synth is a fine representative example of modern Linux audio software.
I know I promised to steer clear of profiling the more language-based synthesis environment, but I also mentioned the blurring tendency occurring with developments in those environments. jMax rapidly is evolving into a rich multimedia composition/processing suite, but it also can be utilized as a straightforward SWSS toolkit. Figure 9 illustrates a simple jMax synthesis patch, complete with self-documentation. Although this example is itself trivial, jMax is capable of far more complex synthesis patches.
Figure 10 demonstrates Istvan Varga's csoundfltk (a Csound package optimized for Linux) running ImproSculpt, a real-time sampler with a rather complex FLTK graphic interface. This example is not really a synthesis patch, but it shows off the power of the Csound FLTK widget set that lets users design GUI panels and control systems for their Csound synthesis and processing designs. Other examples demonstrate Csound as a straightforward synthesizer, and interested readers should check out the material available at www.csounds.com for more examples of the FLTK/Csound powerhouse.
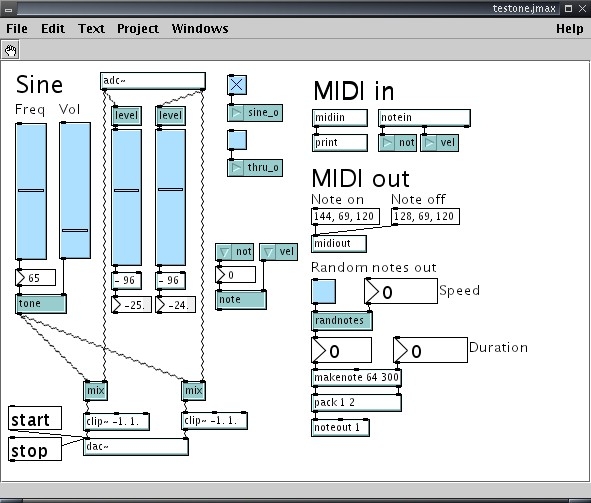
Figure 9. jMax
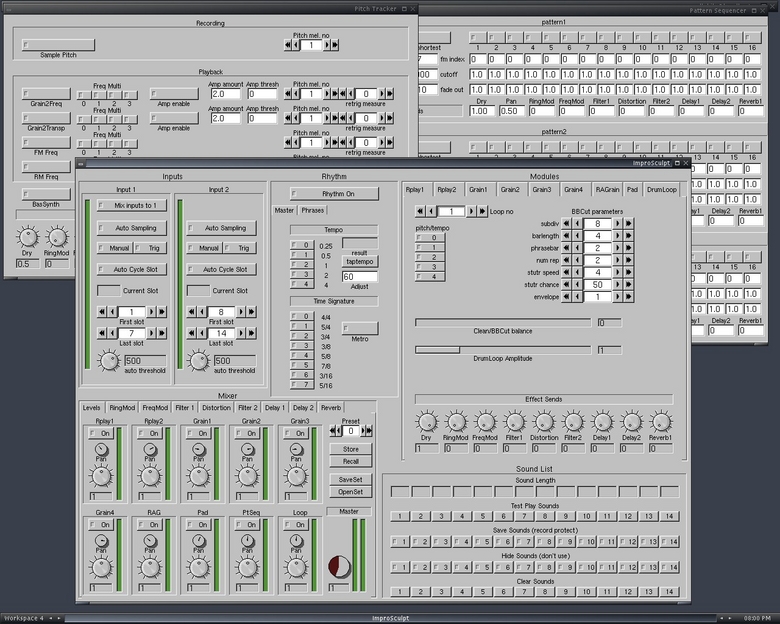
Figure 10. Istvan Varga's csoundfltk running Oeyvind Brandtsegg's ImproSculpt
The best closing advice I can give is to suggest that you check out some of the profiled softsynths yourself. I can wax enthusiastic here in print, but the real proof is in the hearing. So go forth, download and install some of this software, and make some joyful noises. I'll be listening.

Dave Phillips is a musician, teacher and writer living in Findlay, Ohio. He has been an active member of the Linux audio community since his first contact with Linux in 1995. He is the author of The Book of Linux Music & Sound, as well as numerous articles in Linux Journal.

